|
This Project was done as my Thesis for Electronics Engineering.
The Platform had four 0.40 RC Model Engines and was stabilized by custom Cascade
PID Loop.
|

|
This was my test module for the engines. Here I measured the trust produce
by them with diffrent propellers. I alsoo measured al the necesarry parameters
for the modeling of the plant like the response to a step function. That's when
I realize that making a controller was not gonna be an easy task due to the pure
delay in response that the engine had of about 0.2 seconds, plus the low pass
nature of the engine. Believe me 0.2 seconds is a lot when you are trying to control
a plant wich such fast poles (Traslation: if you had one engine pushing with just a
tiny bit of more trust it would take 0.2 seconds for your engine to just begin to
compansate, if your controller is not smart and fast enough, the Platfrom will flip over
and crash)
|

|
This are the main part for the structure of the Flying Platform
|

|
This is the finished frame structure.
|

|
This if the finished Platform before istalling all the componets.
|

|
Here we have a detailed view of one of the airlones that controled the yaw.
|

|
Here we have a detailed view of one of the optocouples that measured the engine speed.
|

|
Detail view of one of the engines.
|

|
Detail view of one of the engines after its duct was covered.
|

|
In this picture we can see the Controller Circutry and the common Gas Tank in the
middle of the Platform.
|
|
|
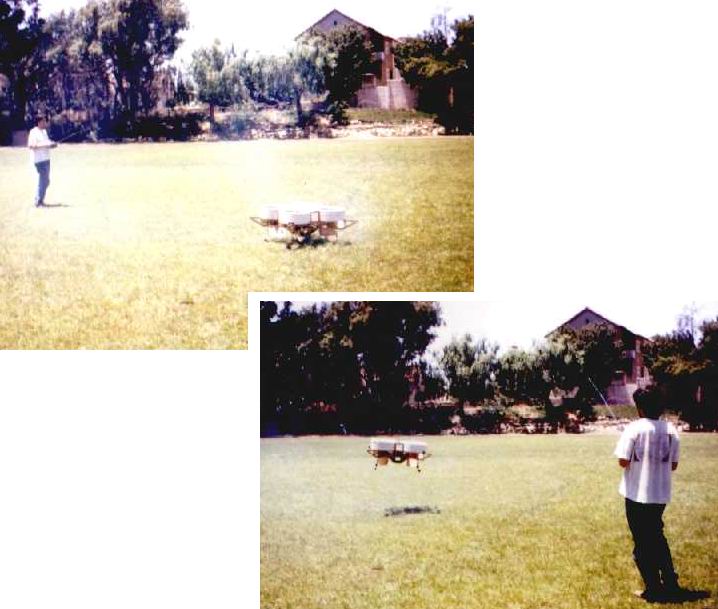
This is finally the finished product, now the free flying tests begin...
|

|
Test with two engines cotroling the angle in one the axis
|
|